














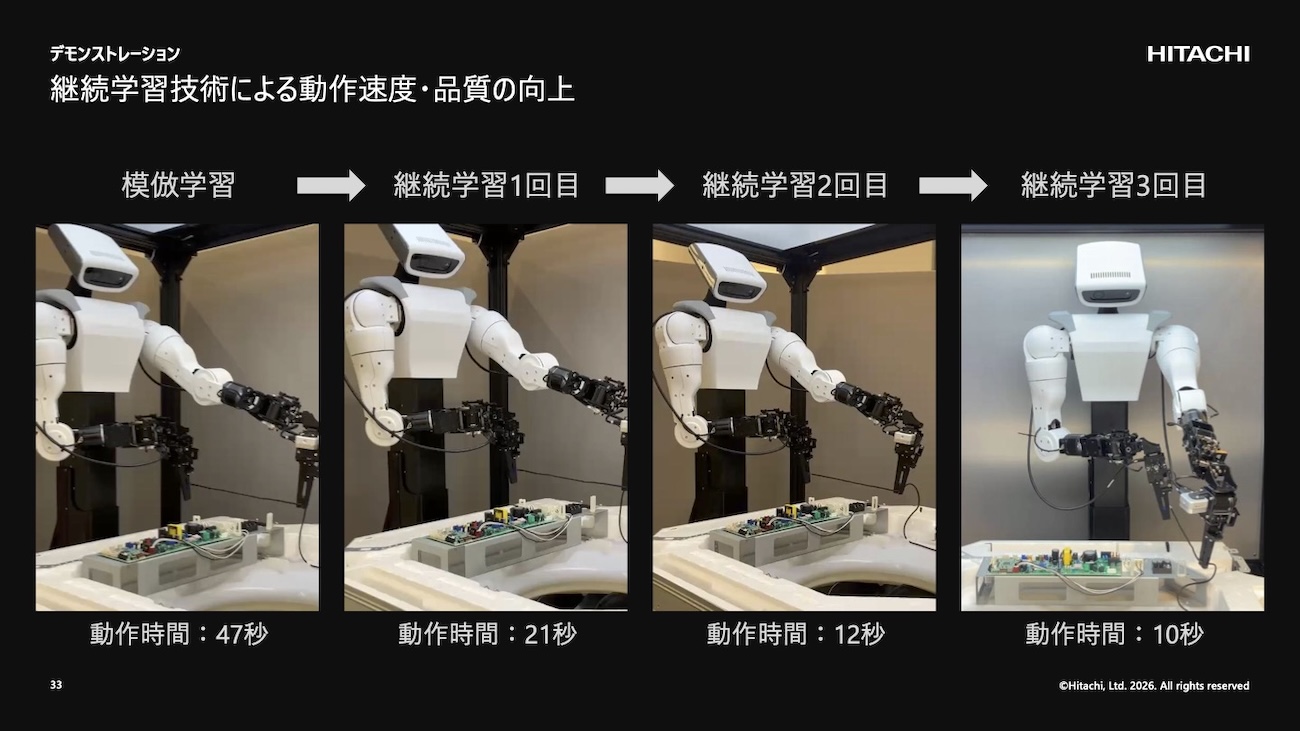
日立製作所は2026年3月23日、企業がフィジカルAIを体験し自社業務への適用を検討できる「フィジカルAI体験スタジオ」を2026年4月1日に開設すると発表した。協創施設「Lumada Innovation Hub Tokyo」内に設置し、来訪者が実機ロボットのデモを見学しながらエンジニアと議論できる場とする。同日、日立は現場で自律的に学習しながら動作を最適化するフィジカルAI技術も発表。会見では継続学習を3回繰り返すことでケーブル敷設にかかる時間を47秒から10秒に短縮するデモも披露された。
展示デモは3つのカテゴリで構成される。推論デモでは、スマートフォンで設備を撮影するだけで稼働状態を判定するAI活用例を体験できる。学習デモでは、人の動きから模倣学習しながら継続的に進化するロボットの実演が行われる。デジタルツインデモでは、立入困難な現場環境をデジタル空間に再現し、AIが危険箇所を検知するシミュレーションを体験できる。また、センサーグローブを使った触覚インタフェースの体験なども用意されている。
AI CoE HMAX & AI推進センター本部長兼Chief AI Transformation Officerの吉田順氏は「まずフィジカルAIとはどういうものかを理解していただき、その上で実際に我々のエンジニアとディスカッションして、業務にどう適用できるかを一緒に考えられる場にしたい」と説明する。
より大規模な設備を見たい場合は、米国のHitachi Hagerstown Factory、羽田・京都のAutomation Square、日立ビルソリューションラボ(エレベーター・エスカレーターの安全性保証体験)など、規模や用途に応じた関連施設へ案内する体制を整えるという。申し込みは日立の営業窓口を通じて受け付ける。
フィジカルAIの3つの研究成果を公開
体験スタジオで展示される技術は、今回発表されたフィジカルAI技術の3要素で構成される。
1. 継続学習技術──現場で動作精度を自律的に高める
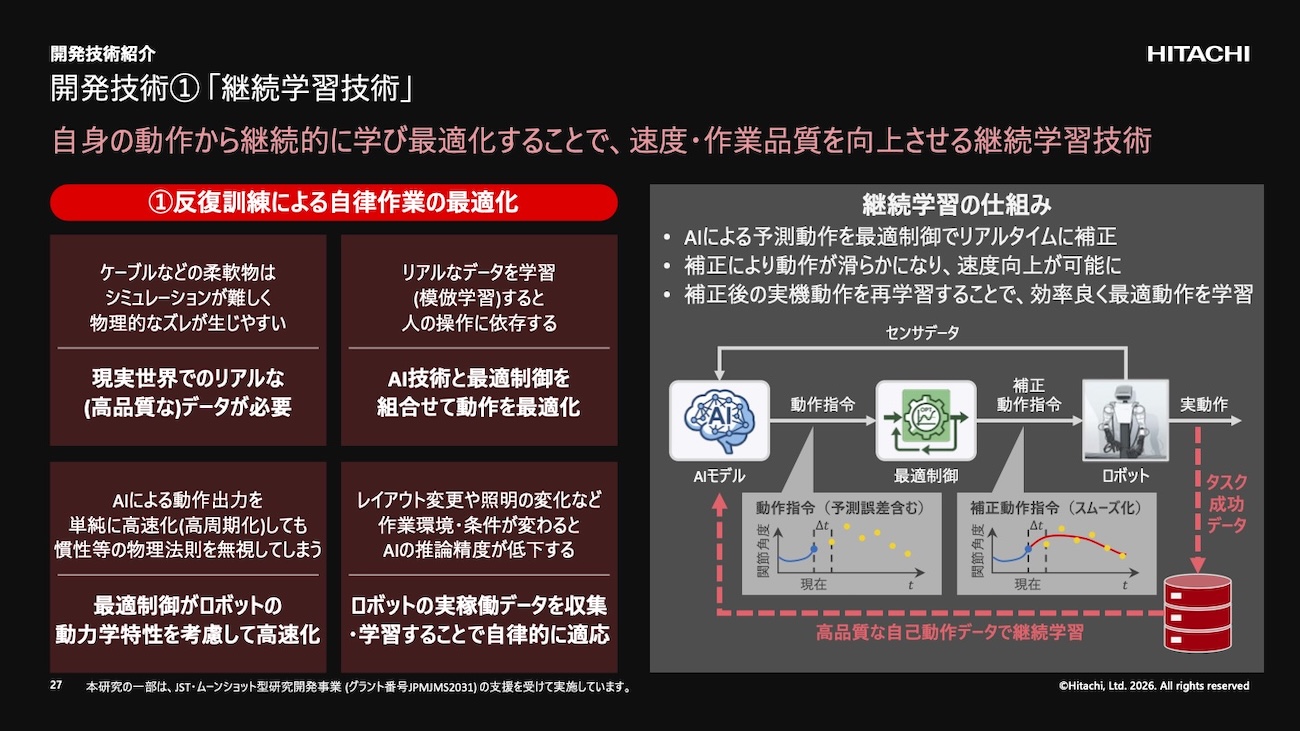
従来の模倣学習では人の動作を手本にAIモデルを構築するため、学習済みモデルが最適な動作を必ずしも獲得しているわけではなかった。日立はロボティクスや航空機制御で実績を持つ最適制御の手法をAIモデルと組み合わせた。AIモデルが生成した動作指令を最適制御によってスムーズに補正してロボットを動かし、タスク達成に成功した良質なデータのみを自動抽出して追加学習するループ構造をとる。設備の入れ替えや製品仕様の変更があっても、大規模な再学習やシステム改修を必要とせず、現場データをもとに自律的に最適化が可能だという。
日立製作所 研究開発グループの山田弘幸氏は、業務用エアコンのケーブルを3つのクリップにはめていく敷設作業のデモを実演した。「模倣学習のみでは47秒かかっていた作業が、継続学習を1回行うと21秒に、2回目で12秒、3回繰り返した結果として10秒まで短縮できた。人間が作業するのと同等の速度だ」と山田氏は説明した。
2. 毎秒100回の高速推論AIモデル──人の「反射」に相当する速さ
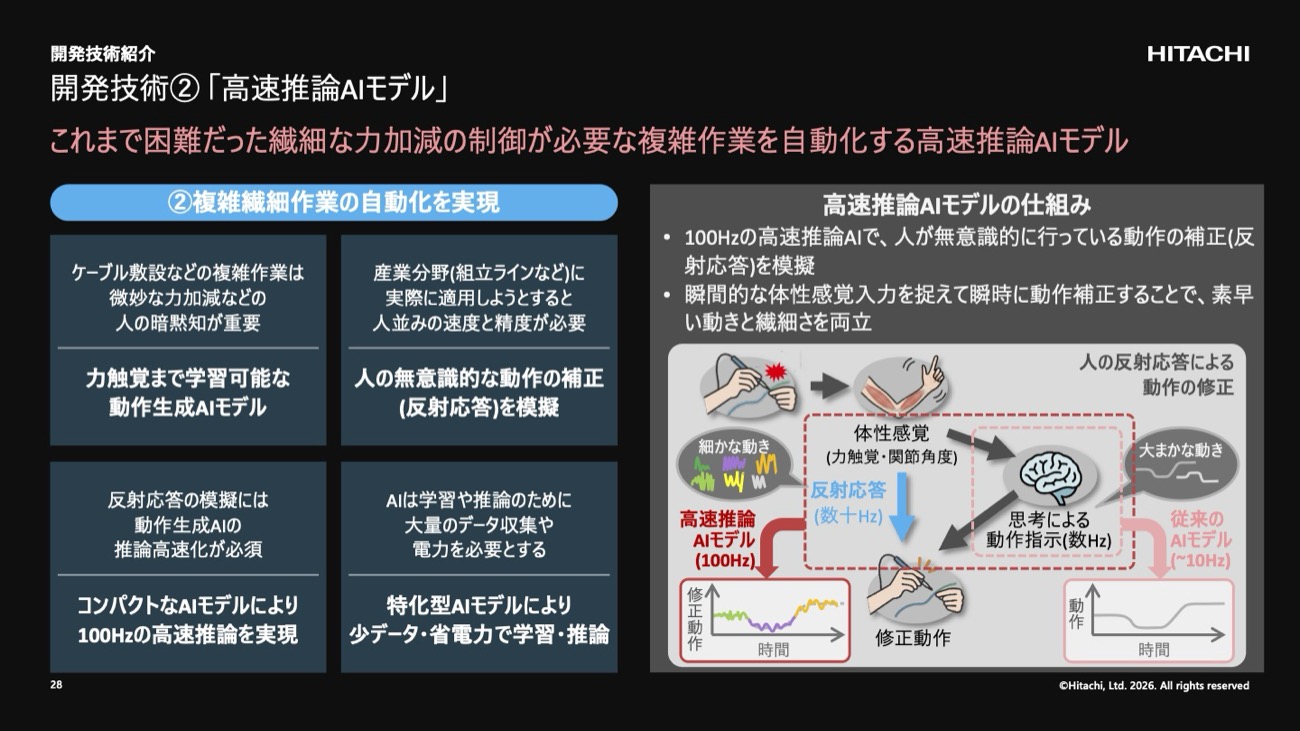
柔らかいケーブルや部品を扱う作業では、微妙な力加減を瞬時に調整する能力が求められる。しかし従来のAIモデルは作業動作指示の速度が毎秒10回程度にとどまっており、触覚センサーの情報を即座に処理して繊細な動きに反映させることが難しかった。
また、早稲田大学との共同研究で開発した「深層予測学習」(AIが先の状況を予測し、現実とのズレを最小限に抑えながら自律的に行動を決定・実行する深層学習技術)を基盤に、毎秒100回の高速推論が可能なAIモデルも開発した。これは人間が体のバランスを無意識に保つ反射動作に相当する速さに当たるという。さらに大規模言語モデルが数十億〜数百億パラメータを持つのに対し、数十万パラメータのコンパクトな設計を採用しており、「少ないデータで効率よく学習でき、省電力で動かしたいという現場のニーズにも対応できる」と山田氏は述べた。
3. 全身協調動作学習──最適な作業姿勢を自律的に選択
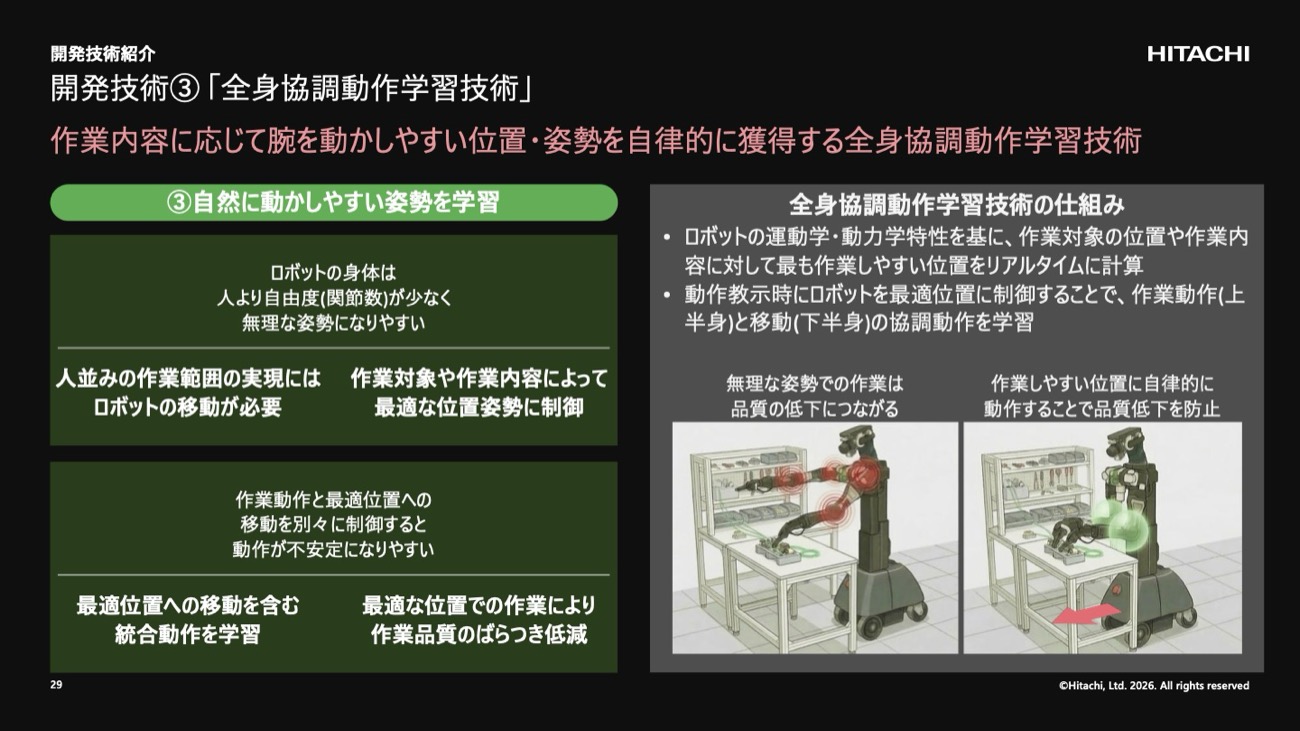
従来の産業用ロボットでは、目的地への移動と到着後の作業は独立した制御として扱われてきた。このため作業対象物が想定外の位置にあると無理な姿勢で作業せざるを得ず、品質のばらつきや手戻りが生じていた。日立が開発した全身協調動作学習技術では、ロボットの運動学・動力学特性をもとに「最も作業しやすい位置」をリアルタイムに計算し、移動と作業を統合的に学習させる。会見では、あえて作業しにくい位置にずらされたロボットが、この技術により自律的に横にスライドして作業しやすい姿勢をとり直す様子が実演された。
HMAXを支える統合モデル「IWIM」に位置づけ
これら3つの技術は、日立が掲げるフィジカルAI統合モデル「IWIM(Integrated World Infrastructure Model)」を構成する要素の一つとして位置づけられる。
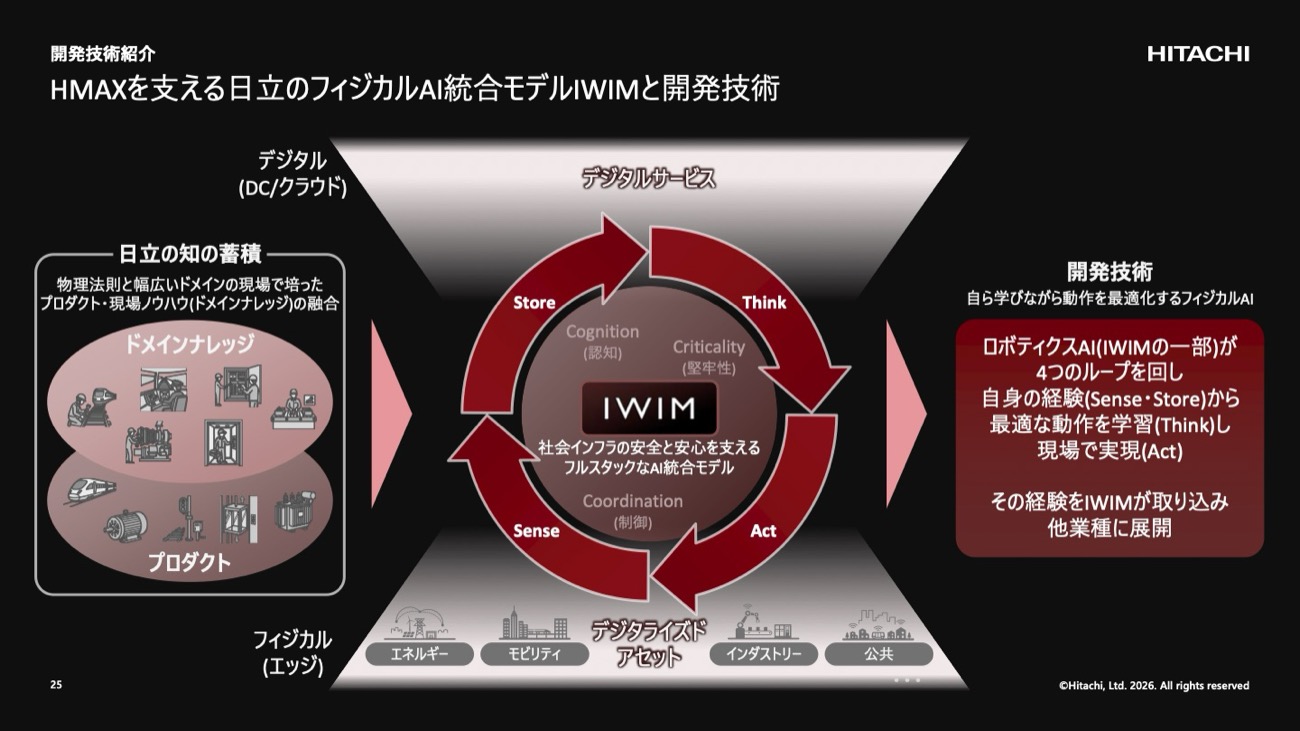
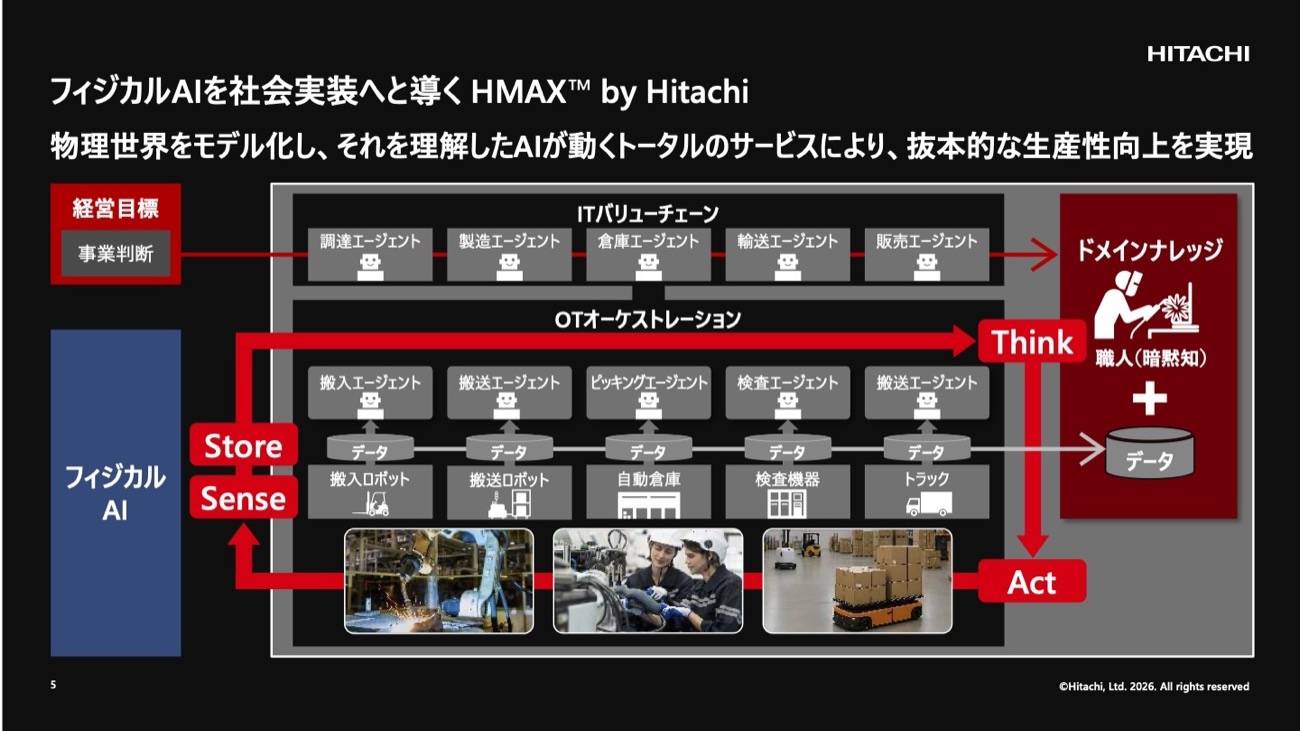
IWIMは、日立が長年にわたって製造業・電力・鉄道などの社会インフラ領域で培ってきたドメインナレッジと、最先端のAI技術を統合するモデルだ。現場のセンサーや設備から情報を「Sense(感知)」して「Store(蓄積)」し、AIが「Think(推論)」して最適な行動を「Act(実行)」する4つのループを現場で継続的に回すことで、フィジカル世界の現象を正確に理解・推論・応答できるAI基盤を構築する。今回開発した継続学習・高速推論・全身協調の3技術は、このIWIMを通じてHMAX by Hitachiの中核技術として、製造・設備保守・ロジスティクスなど幅広い産業現場に展開していく方針だ。
適用するハードウェアについて山田氏は、「今回の会見ではヒューマノイドに近い形状のロボットを使っているが、産業現場では産業ロボットなど現場の作業内容に応じた最適なハードウェアを組み合わせる。今回開発したAI技術は産業ロボットへの適用も可能だ」と述べた。
自社の「カスタマーゼロ」で実績、外販へ
日立はフィジカルAI技術の展開にあたり、自社グループを最初の顧客として位置づける「カスタマーゼロ」戦略を掲げている。鉄道事業では保守コストの15%削減とエネルギー消費量の15%削減、物流現場では生産性の4倍向上という実績がすでに出ているとした。HMAXのソリューションはHMAX Mobility、HMAX Energy、HMAX Industryとして各業界向けに順次リリースを進めており、今後もこれらの実績をもとに顧客への提供を拡大する。
組織面では、4月1日付でフィジカルAIの社会実装を専門的に担う「フィジカルAI推進センター」を新設する。センター長には青山朋子氏が就任する予定で、数十人規模での発足となる見込みだ。
吉田氏は「110年以上にわたってミッションクリティカルな社会システムを手がけてきた経験から得た信頼性・安全性に関するドメインナレッジと、最先端のAI技術の掛け算で、現場で実際に使えるフィジカルAIを作り続けていく」と述べた。
この記事は参考になりましたか?
- この記事の著者
-

京部康男(AIdiver編集部)(キョウベヤスオ)
ライター兼エディター。翔泳社EnterpriseZineとAIdiverには業務委託として関わる。翔泳社在籍時には各種イベントの立ち上げやメディア、書籍、イベントに関わってきた。現在はフリーランスとして、エンタープライズIT、行政情報IT関連、企業のWeb記事作成、企業出版支援などを行う。Mail ...
※プロフィールは、執筆時点、または直近の記事の寄稿時点での内容です
この記事は参考になりましたか?
この記事をシェア